Micro-aerial vehicles (MAVs) suffer from excessive air drag which prevents long distance flight as well as accurate maneuvering toward the mission target. Second related problem is a small lift force achievable by a single MAV. Both drawbacks can be avoided using a modular design. The idea is to couple several MAVs into a formation using flexible joints.
This invention idea was filed to the international patent organization WIPO and received a positive evaluation from the International Search Authority. The examples below illustrate the main features of the invention.
In the case of winged MAVs one can arrange for a joint coupling of several two-winged section into a multi-winged section of arbitrary length. Typical problems related to implementation of 8-shaped trajectory of the flapping wing of an insect can be overcome due to the chained formation. This arrangement simplifies the wing flap to a plain up/down wavy motion with only little angular pitch. This enables a simpler implementation of a wing flapping mechanism than that of an independently flying bi-winged MAV.
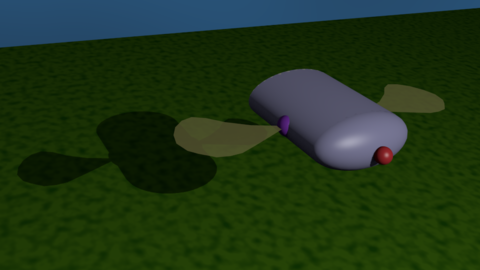
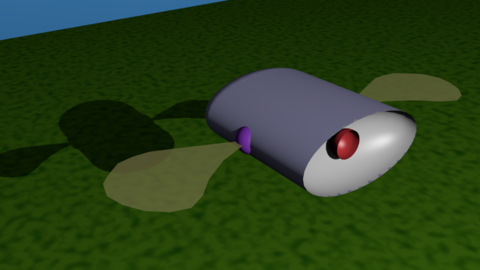
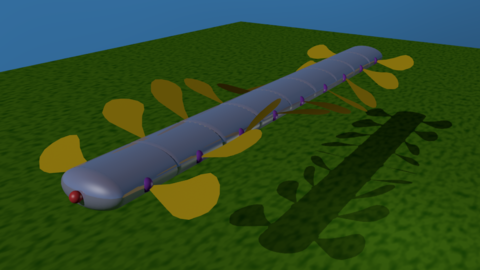
The advantages of this formation is that a frontal drag is reduced as compared to a dispersed swarm and a coherent flapping of the wings will increase the speed and the efficiency of flight. Flexible joints of the sections will enable higher maneuverability of the vehicle as illustrated below.

The size of the MAVs will depend on the mission objectives and constrained by the available technology. Generally, the size can vary from a centimeter to meter range.
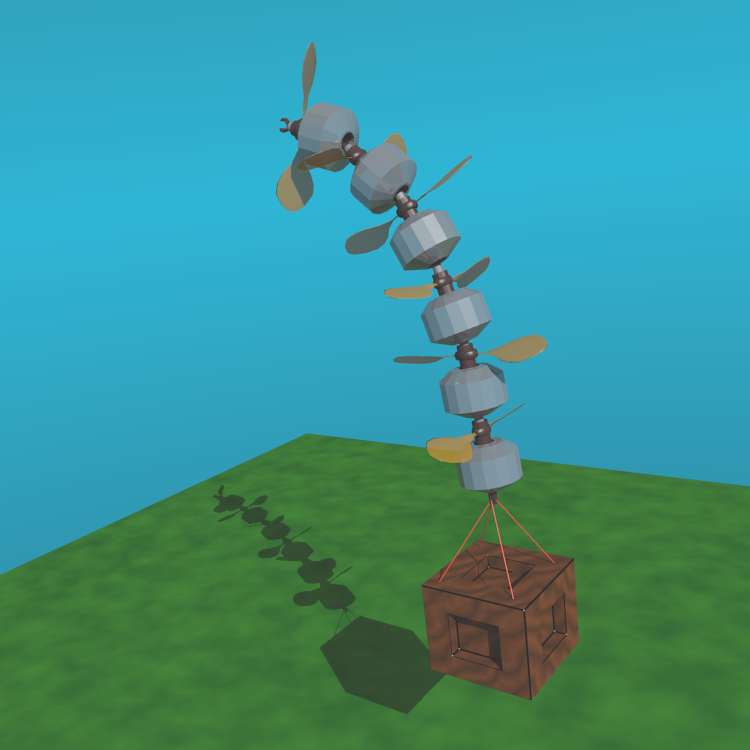
In the case of rotor-based MAVs joint coupling of several sections consisting of a motor and a rotor enables assembly of various size vehicles from simple modules.
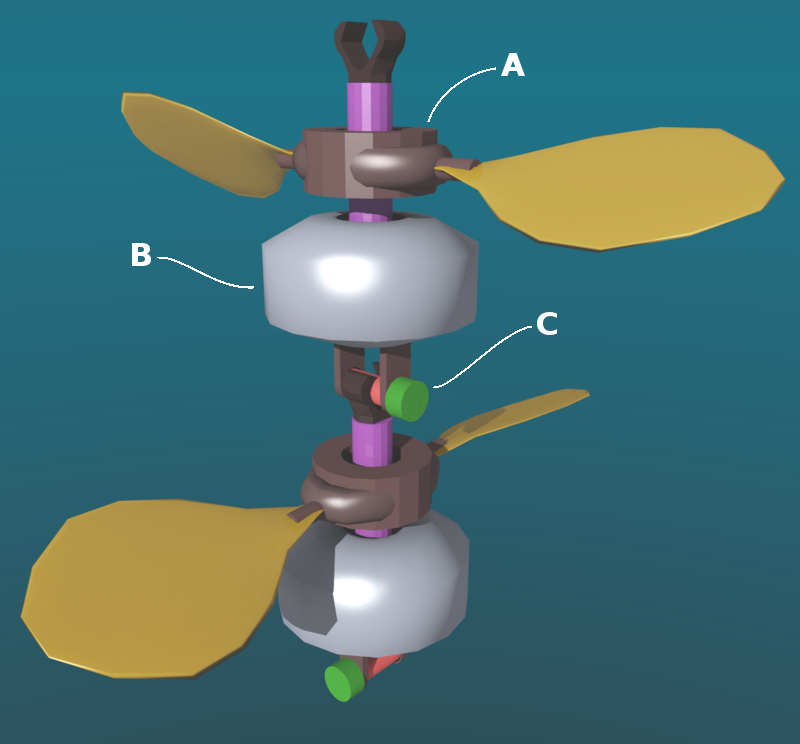
A efficient implementation can be based on electric motors with external (outer) rotor.
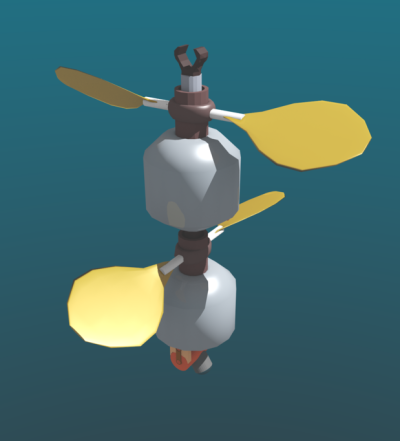
Vertical coupling of several MAVs increases the lifting force, thereby enabling lifting heavier loads, as illustrated in the figures.